- 1. ОСНОВЫ ТЕХНИЧЕСКОЙ МЕХАНИКИ
- 2. МАТЕРИАЛОВЕДЕНИЕ
- 3. ЭЛЕКТРОТЕХНИКА
- 4. ЧТЕНИЕ ЧЕРТЕЖЕЙ И СХЕМ
- 5. ОСНОВЫ ОХРАНЫ ТРУДА И ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ
- 6. УСТАНОВКИ И ПУЛЬТЫ УПРАВЛЕНИЯ
- 7. ТЕХНОЛОГИЧЕСКИЙ ПРОЦЕСС УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ СО СТАЦИОНАРНОГО ПОСТА
-
8. КОНТРОЛЬ КАЧЕСТВА ПРОДУКЦИИ НА УСТАНОВКАХ И ПОСТАХ УПРАВЛЕНИЯ
- 8.1. Организация технического контроля качества продукции
- 8.2. Инженерно-технические методы управления качеством
- 8.3. Сертификация продукции
- 8.4. Квалиметрия и ее роль в управлении качеством
- 8.5.Инструменты качества продукции
- 8.6. Информационное обеспечение управления качеством
- 8.7. Международные стандарты качества
- 9. ОБСЛУЖИВАНИЕ И ЭКСПЛУАТАЦИЯ ПОСТА УПРАВЛЕНИЯ
1.1. Основы технической механики
Статика и ее основные понятия и определения.
В механике изучаются законы взаимодействия и движения твердых тел.
Механическим движением называется происходящее с течением времени изменение положения точек или тел в пространстве. Частным случаем движения является состояние покоя. Покой всегда имеет относительный характер, так как покоящееся тело рассматривается как неподвижное по отношению к другому телу, которое, в свою очередь, может перемещаться в пространстве.
Абсолютно твердым телом называется тело, когда расстояние между любыми его точками не меняется при действии на него других тел. В статике полагают, что тела абсолютно твердые и их физико-механические свойства не учитывают.
В статике любое тело можно считать материальной точкой, размерами которого в условиях данной задачи можно пренебречь.
Материальной точкой называется точка, имеющая массу.
Свободным называется тело, когда никакие другие тела не препятствуют его перемещению в любом направлении. В противном случае тело называется несвободным.
Сила есть мера механического взаимодействия тел. Она характеризуется числовым значением, направлением и точкой приложения. Из этого следует, что сила — величина векторная. Числовое значение силы называется модулем вектора силы. Направление силы есть направление того движения, которое получила бы покоящаяся свободная материальная точка под действием этой силы.
Линия действия силы - это прямая линия, по которой направлен вектор силы.
Единицей измерения силы в системе СИ является Ньютон (Н) -это сила, сообщаемая телу массой 1 кг ускорение 1м/с в направлении действия силы. Допускаются внесистемные единицы: килограмм-сила (КС, КГ), тонна-сила (ТС), дина.
Между перечисленными единицами силы существуют следующие зависимости:
1Н=105дин=0,102кг.
Графически силу изображают отрезком прямой со стрелкой; длина отрезка в определенном масштабе равна модулю вектора силы.
Масштаб силы: сколько единиц модуля силы содержится в единице длины ее вектора
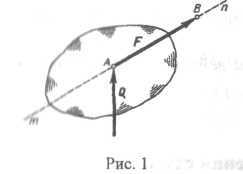
На рис. 1 изображена сила, приложенная в точке А и действующая по линии тп. Вектор силы обозначается, как правило, буквой с черточкой над ней (F), а модуль без черточки (F). Для силы F точка А называется началом, а точка В концом вектора. Нередко удобно изображать вектор силы так, чтобы стрелка, стоящая в конце вектора, упиралась в точку приложения силы (сила Q).
Системой сил называется совокупность нескольких сил, приложенных к телу, в точке или системе тел и точек.
Система сил, линии действия которых лежат в различных плоскостях, называется пространственной, а в одной плоскости - плоской.
Система сил, с пересекающимися в одной точке линиями действия, называется сходящейся, которая может быть плоской и пространственной.
Различают также систему параллельных сил как частный случай произвольно расположенных сил, в которых линии действия сил не схожи в одной точке.
Они также могут быть плоскими и пространственными.
В статике решаются следующие три основные задачи:
1. Приведение данной системы сил к другой, более простой, статистически эквивалентной системе;
2. Нахождение условий равновесия данной системы сил;
3.Определение сил взаимодействия между материальными объектами.
Аксиомы статики
В основе статики лежит ряд основных положений, полученных в результате наблюдений, опыта и практической деятельности людей. На основании этих положений, называемых аксиомами статики, путем строгих математических доказательств делаются все последующие выводы.1 аксиома статики, получившая название аксиомы инерции, заключается в следующем:
Аксиома 1. Изолированная материальная точка находится в состоянии покоя или движется равномерно и прямолинейно.
Согласно этой аксиоме, материальная точка может двигаться равномерно и прямолинейно без приложенной к ней силы (по инерции). Изменить состояние покоя или равномерного прямолинейного движения материальной точки может только сила.
Упомянутые два состояния точки объединяются в общем понятии "равновесие".
Аксиома 2. Две силы, приложенные к твердому телу, взаимно уравновешиваются только тогда, когда они равны по величине и направлены по одной прямой в противоположные стороны (рис. 1.1).
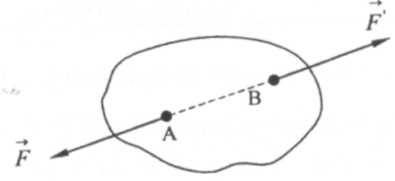
Из этой аксиомы и рис. 1.1. следует, что при равновесии рассматриваемого тела F = F Рис. 1.1
Аксиома 3. Две силы, приложенные к твердому телу в одной точке, имеют равнодействующую, приложенную в этой же точке и изображаются диагональю параллелограмма, построенного на этих силах, как на сторонах.
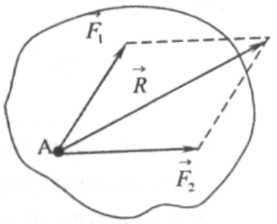
На рис 1.2 показана равнодействующая R двух сил F1 и F2, приложенных к твердому телу в точке А. Операция замены системы сил её равнодействующей называется сложением данной системы сил.
Мы видим, что сложение двух сил, приложенных к твердому телу в одной точке, подчиняется правилу векторного сложения, чем подтверждается высказанное предположение о том, что сила есть вектор.
Таким образом, равнодействующая двух сил, приложенных к твердому телу в одной точке, равна их векторной сумме, т.е. ¯R = ¯F1+¯F2. (1.1)
Аксиома 4. Присоединение или отбрасывание взаимно уравновешивающихся сил не изменяет действия данной системы сил на твердое тело.
Например, если Q=Q, то системы сил, показанные на рис. 1.3, статически эквивалентны, так как на основании аксиомы 2 силы Q и Q/ взаимно уравновешиваются и, следовательно, в силу аксиомы 4, их можно присоединить или отбросить.
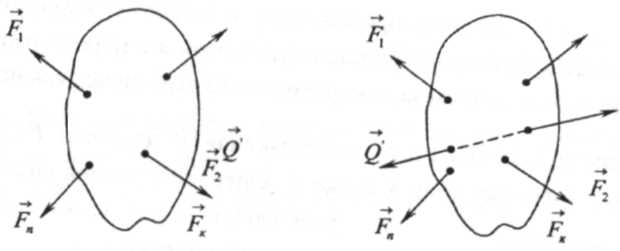
Рис. 1.3
Аксиома 5. Если каждая из двух систем статически эквивалентна одной и той же третьей системе, то они статически эквивалентны между собой. Понятно, что если система сил А статически эквивалентна системе С, и в то же время система В статически эквивалентна системе С, то и системы А и В статически эквивалентны одна другой.
Из приведенных аксиом вытекают следующие следствия.
Следствие 1. Не изменяя действия силы на твердое тело, можно переносить её точку приложения вдоль линии действия на любую точку тела.
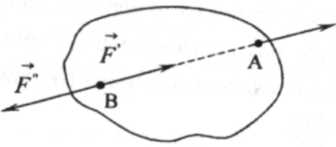
Рис. 1.4
В самом деле, три одинаковые по модулю силы F , F / и —► F ? / (рис. 1.4), направленные вдоль прямой, проходящие через точки А и В, статически эквивалентны, с одной стороны, силе F, так как силы F и F" взаимно уравновешиваются, и с другой стороны, силе и F , так как уравновешиваются силы F и F'/ . Следовательно, статически эквивалентны силы F и F"', т.е. точку А приложения силы F можно переносить вдоль её линии в любую точку В твердого тела.
Такие векторы, которые по их физическому смыслу можно переносить вдоль прямых, по которым они направлены, называются скользящими векторами.
Следовательно, сила есть вектор скользящий.
Следствие 2. Сила ¯R (рис. 1.5) равная по модулю равнодействующей ¯R и направленная по одной с ней прямой в противоположную сторону, уравновешивает данную систему сил.
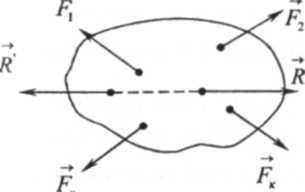
Поскольку сила R/ уравновешивает равнодействующую R, то она уравновешивает и статистически эквивалентную ей систему сил. F1 F2 ….Fn
Шестая аксиома, называемая аксиомой действия и противодействия, заключается в следующем:
Аксиома 6. Силы взаимодействия любых двух материальных объектов всегда равны по величине и направлены по одной прямой в противоположные стороны.
 ¯ F¯ F?¯
¯ F¯ F?¯ 
Эта аксиома, сформулированная Ньютоном, означает, что если объект А (рис. 1.6) действует на объект В и это действие выражается силой F , то объект В оказывает объекту А противодействие, выраженное силой F/ , причем F = - F'.
Таким образом, всякой силе, приложенной к некоторому материальному объекту, соответствует равная ей по модулю и прямо противоположная по направлению сила, приложенная к другому объекту, взаимодействующему с данным. Подчеркнем, что силы действия и противодействия не уравновешивают друг друга, так как они приложены к различным объектам.
Седьмая аксиома называется аксиомой отвердения. Она заключается в следующем:
Аксиома 7. Если нетвердое тело находится в равновесии под действием приложенных к нему сил, то равновесие его не нарушается при его отвердении.
Из этой аксиомы следует, что если нетвердое тело находится в равновесии под действием приложенных к нему сил, то под действием этой же системы сил будет находиться в равновесии и Рис. 1.7 соответствующее абсолютно твердое тело.
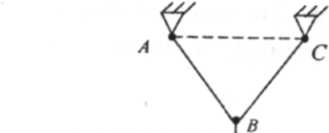
Например, если нить ABC (рис. 1.7), закрепленная в точках А и С, находится в равновесии под действием приложенной к ней вертикальной
силы F, то под действием этой же силы будет находиться в равновесии и абсолютно твердое тело, имеющее такую же форму. Обратное заключение сделать нельзя, т.е. из того, что под действием некоторой системы сил находится в равновесии абсолютно твердое тело, вовсе не следует, что под действием этой же системы сил будет находиться в равновесии и любое нетвердое тело.
Например, если к нити, показанной на рис. 1.7 приложить в. точке В силу, направленную по вертикали вверх, то она не будет находиться в равновесии, тогда как соответствующее абсолютное твердое тело и в этом случае будет находиться в равновесии.
Из этого следует, что вместо равновесия реально существующих тел, можно рассматривать равновесие соответствующих абсолютно твердых тел.
Этими аксиомами и следствиями из них мы будем пользоваться при изложении последующих тем статики, в которых рассматриваются различные виды систем сил, приложенных к материальному объекту.
Простейшей из таких систем является система сходящихся сил.
Система сходящихся сил.

Ранее были рассмотрены аксиомы статики и их основные определения. Теперь перейдем к изучению простейшей системы сил. Такой системой является система сходящихся сил, т.е. таких сил, линии которых пересекаются в одной точке (рис. 1.8).Если линии действия всех сил такой системы расположены в одной плоскости, то система называется плоской системой сходящихся сил. В противном случае эта система называется пространственной системой сходящихся сил.
Приведение системы сходящихся сил к простейшему виду
а) Геометрический метод сложения сходящихся сил .
Термин "сложить систему сил" означает - найти её равнодействующую. Задачи о сложении и равновесии сходящихся сил впервые решены Вариньоном. Начнем решение с поставленной задачи со случая сложения двух сходящихся сил. Пусть в точках А и В (рис. 1.9) к твердому телу приложены две силы F1 и F2, линии действия которых пересекаются в точке О.

Поскольку сила является вектором скользящим, то перенося каждую из данных сил F1и F2 вдоль их действия в точку О, получим две силы, приложенные к твердому телу в одной точке О. Сложив их, на основании аксиомы 3, получим равнодействующую А, приложенную в этой точке и изображенную диагональю параллелограмма, построенного на этих силах, как на сторонах. Такой способ сложения двух сходящихся сил называется правилом параллелограмма сил.
Эта же задача также может быть решена с помощью правила треугольника сил, заключающегося в следующем (рис. 1.10). -

Из произвольной точки а (рис. 1.10б) проведем вектор f/=f, и из конца его b вектор f1=F2. Соединив точку а с концом вектора f2, получим вектор r', равный равнодействующей r данных сил. Последняя сила приложена в точке 0 пересечения линий действия данных сил f, и f2.
Теперь допустим, что требуется сложить систему сходящихся сил f1, f2 f,3 приложенных к твердому телу в различных его точках a1, а2, ...ап (рис. 1.11).

Перенеся все силы вдоль их линий действия в общую их точку пересечения, получим систему сил приложенных к данному телу в одной точке 0. Для сложения сил воспользуемся методом последовательного их сложения.
Сложим сначала силы f1 и f2, использовав правило треугольника сил. Для этого из произвольной точки а (рис. 1.11б) проведем последовательно векторы F1f2 , равные соответственно векторам f1 и f2. Равнодействующая этих сил равна вектору r', проведенному из точки а в конец с вектора f2 , и приложена в точке 0 пересечения линий действия данных сил (рис. 1.11а), причем r, =F1 +f2 . На рис. 1.11 б вектор R, показан пунктиром. Теперь, найденную равнодействующую r, сложим со следующей силой f3. Для этого из конца с вектора r1 проведем вектор f2 =f3. Тогда вектор R2 (см. пунктир на рис. 1.116), проведенный из точки а в конце d вектора F3, будет равен равнодействующей сил R, и F3, т.е. трех сил F 1F2, F3, причем R 2=R1 +F3,=Ft +F2 +F3. Приложена эта равнодействующая также в точке 0 (на рис. 1.11а) равнодействующие R2 и R1, не показаны. Аналогично складывая равнодействующую R2 последовательно со всеми остальными силами данной системы, получим равнодействующую r всех данных сил, приложенную в точке 0 и равную r = R/ =F1+F2'+F3'+...+ Fп' =ΣFк,
где R' - вектор, проведенный из точки а в конец е последнего из векторов, построенных на рис. 1.116.
Учтя, что Fk=Fk (к=1,2,...п), окончательно получим r = ΣFк. .
Сумма, стоящая в правой части этого равенства, называется векторной суммой сил.
Как нетрудно видеть, для построения вектора r равнодействующей системы сходящихся сил достаточно, начиная от произвольной точки а провести последовательно один за другим векторы f1,f2,...,fп, равные соответственно векторам данной системы сил F, ,F2 ,.. fп, из точки а провести вектор r в конец е последнего из проведенных векторов и затем перенести его параллельно в точку 0 пересечения линий действия данных сил. Многоугольник abcde называется многоугольником сил, а такой способ сложения системы сходящихся сил получил название правила многоугольника. Вектор r , направленный противоположно всем остальным сторонам многоугольника adcde при обходе его периметра, называется замыкающей стороной многоугольника сил.
Таким образом, равнодействующая системы сходящихся сил равна замыкающей стороне многоугольника сил, построенного на данных силах, как на сторонах, или векторной сумме этих сил, и приложена в точке пересечения их линий действия.
Заметим, что описанный способ применим не только для сложения плоской системы сходящихся сил. Им можно также пользоваться и при сложении сходящихся сил, не лежащих в одной плоскости, хотя в последнем случае применение его очень неудобно, так как трудно изобразить на плоскости пространственный многоугольник сил.
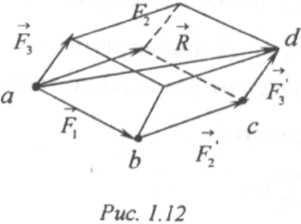
Особого внимания заслуживает сложение трех сходящихся сил, линии действия которых не лежат в одной плоскости. Пусть дана пространственная система трех сходящихся сил F1, F2, F3, (рис. 1.12). Построим на этих силах пространственный многоугольник сил abсd (точка а этого многоугольника совмещена с точкой приложения сил данной системы).
Его замыкающая сторона ad = R равна по величине и направлению равнодействующей данных сил. Достроив этот многоугольник до параллелограмма, как это показано на рисунке, убедимся, что вектор равнодействующей R изображается его диагональю, а векторы данных сил F1, F2 и F3 - ребрами, исходящими из той же вершины d, из которой проведен вектор r .
Таким образом, приходим к выводу, что равнодействующая трех сходящихся сил, линии действия которых не лежат в одной плоскости, изображается диагональю параллелепипеда, построенного на данных силах, как на ребрах, исходящих из общей вершины.
б) Векторное условие равновесия системы сходящихся сил
Пусть r - равнодействующая системы сходящихся сил F1, F2, ..,Fп-1, (рис. 1.13).
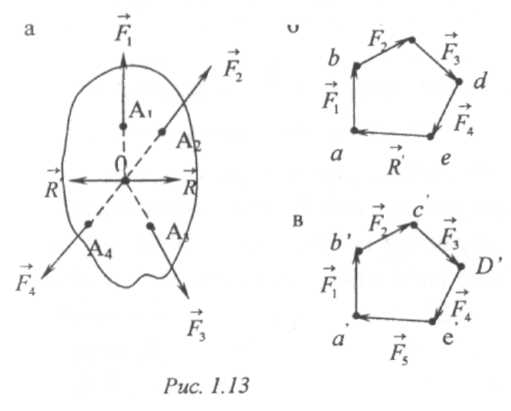
Поскольку сила R ', равная по модулю равнодействующей R и направленная по той же прямой в противоположную сторону, уравновешивает данную систему сил, то, присоединив к данной системе сил Fп = r (на рис. 1.13 силу F5) , мы получим взаимно уравновешенную систему сил F1, F2 , .., Fп (на рис. 1.13 систему F1 F2, .., Fп).
Если теперь вектор Fn присоединить к ломаной кривой abсde, то конец его совпадает с началом а вектора первой силы F, (рис. 1.1 Зв). Многоугольник сил abсdea, стороны которого направлены при обходе вдоль его периметра в одном и том же направлении, называется замкнутым. Равнодействующая такой системы сил равна нулю.
Следовательно, если система сходящихся сил взаимно уравновешивается, то соответствующий многоугольник сил замкнут и равнодействующая или векторная сумма сил равна 0.
Таким образом, необходимым условием равновесия системы сходящихся сил является равенство 0 векторной суммы данных сил. Это условие является также и достаточным.
В самом деле, если дана система сходящихся сил F1, F2, .., Fп, векторная сумма которых равна нулю (рис. 1.13в), то, заменив силы F,, F2, .., Fп-1 , их равнодействующей
R= -Fп приложенной в точке 0 (рис. 1.13а), будем иметь две равные и противоположно направленные по одной прямой силы R и r =F„, которые, на основании аксиомы 2, взаимно уравновешиваются. Следовательно, уравновешивается и система сил F1, F2, .., Fп.
Таким образом, векторным условием равновесия системы сходящихся сил является векторное равенство: ΣFt=0, что означает, что многоугольник сил, построенный на силах данной системы, должен быть замкнутым.
Разложение силы на составляющие, приложенные в её точке приложения
Теперь решим обратную задачу. Пусть задана сила¯F, приложенная в некоторой точке А. Требуется разложить её на составляющие, приложенные в этой же точке.
Рассмотрим сначала случай разложения силы F на две составляющие F1 и F2 (рис. 1.14). Эта задача сводится к построению параллелограмма, диагональю которого изображался бы вектор данной силы. Таких параллелограммов можно построить бесчисленное множество. Следовательно, поставленная задача является многозначной. Чтобы сделать её однозначной, необходимо задать дополнительные условия. 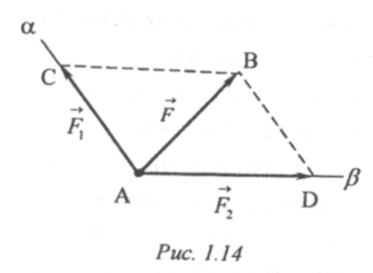
Наиболее часто встречается задача о разложении силы на две составляющие, приложенные в её точке приложения, по заданным линиям действия искомых составляющих.
Пусть силу ¯F, приложенную в точке А (рис. 1.14), требуется разложить на две составляющие, приложенные в этой же точке и направленные по заданным прямым Аа и Аβ. Для решения этой задачи достаточно из конца В вектора F провести прямые ВД и ВС, параллельные соответственно прямым Аа и Аβ Тогда стороны АС и AD построенного таким образом параллелограмма ABCD изобразят векторы искомых составляющих F1 и F2.
Для разложения силы на две составляющие, приложенные в её точке приложения, могут быть также заданы величины составляющих сил или величина и линия действия одной из них и, наконец, величина одной и линия другой. Во всех этих случаях задача решается путем геометрического построения параллелограмма сил. Предлагается самостоятельно рассмотреть все эти случаи и выяснить, при каких условиях каждая из этих задач является однозначной, двузначной или не имеет решений.
Рассмотрим теперь случай разложения силы на три некомпланарные составляющие, приложенные в её же точке приложения. Эта задача сводится к построению параллелепипеда, диагональю которого изображался бы вектор данной силы, и в общем случае также является многозначной. Для того чтобы сделать её однозначной, необходимо задать дополнительные условия. Наиболее важным является случай разложения силы на три некомпланарные составляющие, приложенные в одной с ней точке, по заданным линиям действия всех трех составляющих.